SIP自動運転の成果を活用した安全性評価用シミュレーションソフトの製品化~戦略的イノベーション創造プログラム(SIP)研究成果を社会実装へ~
令和4年9月6日
科学技術・イノベーション推進事務局
プレスリリース
自動運転の実現には、安全性の確保が最重要課題です。SIP自動運転では、様々な交通環境下におけるセンサの弱点現象の検証を可能とするため、実現象と一致性の高いシミュレーションモデルの開発に、産学官連携で取り組んでいます。今回、DIVP(R)(Driving Intelligence Validation Platform)の成果を活用する形でSIP-adusに参画していた企業などにより、新事業会社が設立され、安全性評価環境プラットフォームであるDIVP(R)を製品化することとなりました。
この取組は「基礎研究から実用化・事業化」を掲げるSIPの理念に合致することであり、今後社会実装の進展により、安全な自動運転社会の実現への貢献が期待されます。
1.背景
戦略的イノベーション創造プログラム(SIP)は、Society 5.0の実現を目指し、総合科学技術・イノベーション会議の下、府省・分野の枠を超えて基礎研究から実用化、事業化の出口までを見据えた研究開発プログラムです。SIP第2期「自動運転(システムとサービスの拡張)」(以下、「SIP自動運転」という。)は、SIPの12課題のうちの1つであり、交通事故の低減、交通渋滞の削減、交通制約者のモビリティの確保、物流・移動サービスのドライバー不足の改善・コスト低減等の社会的課題の解決に貢献し、全ての人が質の高い生活を送ることができる社会の実現を目指して、産学官共同で取り組むべき自動運転の共通課題(協調領域)の研究開発を推進しています。
2.開発の経緯
自動運転の実用化及び普及展開には、安全性や信頼性の確保が最重要課題であり、自動運転車両の安全性評価手法の確立が急務となっています。安全性評価のための重要な評価法として実車を使った実証実験がありますが、この実車による評価のみで、公道において起こる様々な事象を全て評価するのは困難である上に、膨大な時間がかかることになります。このため、SIP自動運転では、2018年から学校法人幾徳学園 神奈川工科大学、BIPROGY株式会社及び三菱プレシジョン株式会社を中心とするDIVP(R) (Driving Intelligence Validation Platform)コンソーシアムが参画し、産学官のオールジャパン体制で「仮想空間における安全性評価環境の構築」に取り組んでいます。

3.安全性評価用環境プラットフォーム DIVP(R)の特徴
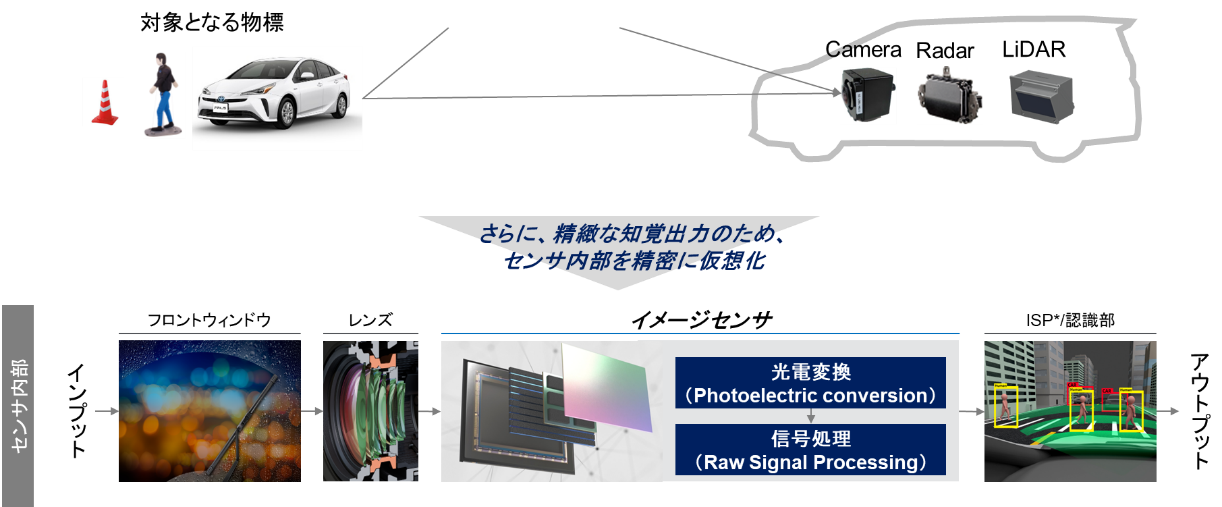
自動運転車の安全性評価のためには、“目”の役割をもつセンサの評価と“脳”の働きをもつ車両制御ソフト両方の評価が必要となります。一方、センサとしてのカメラ、Radar、LiDARには各々長所・短所があるため、自動運転車の開発にあたっては、これら複数のセンサを組み合わせることで、誤検知(見間違い)や不検知(見落とし)がないように配慮されています。
また、自動運転車の安全性評価では、様々な環境下における、厳しい条件での評価が必要になります。このようなニーズを満足するために“シミュレーション”は有効な手段ですが、これまでは実環境下と同じようにセンサを評価できるようなシミュレーションはありませんでした。今回開発されたDIVP製品は以下のような特徴を備えています。
3-1.実現象と一致性の高いシミュレーションモデル
センサ出力を精緻に再現するため、各センサ検出原理、使用電磁波帯域における物理現象を、反射物性の原理原則に基づきモデル化し、実車試験結果と
の突合せにより一致性検証が実施されています。
3-2.シナリオ生成⇒認識性能評価⇒車両制御検証が一気通貫で可能なプラットフォーム
DIVP(R) 研究成果がツールチェーンとして提供されます。 AD/ADAS(1)システムの安全の鍵となるセンサ弱点の再現、及び、シナリオ作成~結果解
析・評価までの効率化が可能です。

3-3.既存のシミュレーションソフトとの結合性の確保
DIVP(R) 研究成果がツールチェーンとして提供されます。 AD/ADAS(1)システムの安全の鍵となるセンサ弱点の再現、及び、シナリオ作成~結果解
析・評価までの効率化が可能ですドイツを拠点とする国際標準化団体ASAM(2)の標準であるOSI(3), Open Scenario、Open Drive等に準拠することによ
り、既存のシミュレーションソフトとの結合が確保されています。この開発に当たり、日独連携等の枠組みを活用して、ASAMに対して標準仕様を提言す
るなど、国際標準化活動に貢献しています。
AD/ADAS(1): AD; Automated driving, ADAS; Advanced Driving Assistance System
ASAM(2): Association for Standardization of Automation and Measuring Systems
OSI(3) : Open Simulation Interface
4.DIVP(R)で実現可能な主な機能
4-1.カメラ、Radar、LiDARのセンサの認識性能を同時に評価が可能
首都高C1浜崎橋~江戸橋ジャンクションにおける各センサの出力例

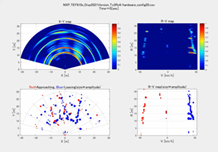
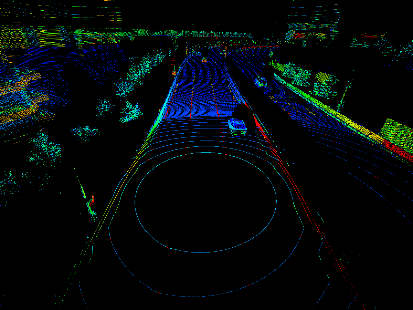
カメラ ミリ波Radar LiDAR
4-2.実走行では再現困難な、様々なセンサ弱点の環境要因を組み合わせたシナリオでの効率的な検証が可能
センサ弱点の例
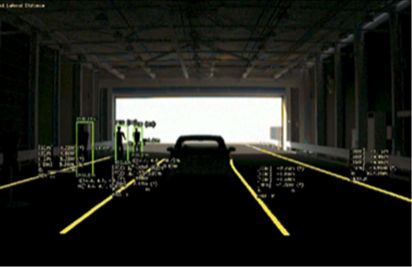


トンネル出口 青海1丁目交差点(逆光) (フロントガラス雨滴)
4-3.見えているか?ぶつからないか?の両面から、自動運転車両の安全性評価が可能
安全性評価の例

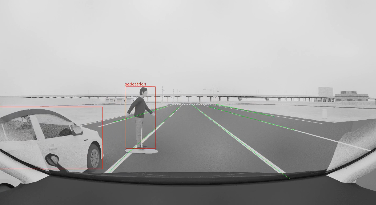
Euro NCAP*(歩行者横断シーン) Euro NCAP*(歩行者横断車載カメラ視点)
NCAP*: New Car Assessment Program
5.事業形態
2022年9月6日から、BIPROGY株式会社が100%出資する新事業会社V-Drive Technologies株式会社よりDIVP(R)製品が販売されます。シミュレーションプラットフォームの提供形態としては、(1)クラウド方式と(2)ユーザー環境下でのモジュール提供方式の2形態が準備されます。
問合せ先
SIP第2期「自動運転(システムとサービスの拡張)」について
内閣府 科学技術・イノベーション推進事務局
SIP自動運転担当(保坂、荒木、木村)
電話:03-6257-1334(直通)
DIVPの事業化、DIVP製品について
BIPROGY株式会社 今村 康
電話:090-7911-3535
V-Drive Technologies株式会社 木村 聡輔
電話:050-3132-6649