トピックス 車両の先進安全技術について
官民ITS構想・ロードマップ2015
官民ITS構想・ロードマップ2015は,ITS(Intelligent Transport Systems:高度道路交通システム)を巡る最近の情勢変化等を踏まえ,前年にIT総合戦略本部で決定された「官民ITS構想・ロードマップ」(以下ロードマップという)を改定する形で平成27年6月にIT総合戦略本部で決定されたITS・自動走行に係る国家戦略文書である。
もともと同ロードマップは,「世界一のITSを構築・維持し,日本・世界に貢献する」ことを目標に,「安全運転支援システム・自動走行システム」と「交通データ利活用」の2つの項目を対象として,民間及び関係省庁が一体となって取り組むべき方向とその具体的な工程表を含む形で平成 26年6月に策定されている。
同ロードマップでは,世界一のITSを構築するための目標として,図1の通り 2030年までに「世界一安全で円滑な」道路交通社会を構築すべきとの目標を設定すると共に,安全運転支援システム・自動走行システムに係る定義を明確化した上で,世界一の観点から表1に示す自動走行システムの市場化期待時期を設定した。
| レベル | 実現が見込まれる技術 | 市場化期待時期 |
|---|---|---|
| レベル2 | ・追従・追尾システム | 2010年代半ば |
| ・衝突回避のためのステアリング | ||
| ・複数レーンでの自動走行等 | 2017年 | |
| レベル3 | ・自動合流等 | 2020年代前半 |
| レベル4 | ・完全自動走行 | 2020年代後半以降 |
一方,同ロードマップの策定後も,自動走行システムを含むITSを巡る技術・産業の動きは急速に変化している。特に海外において自動車メーカーを含む多くの企業等が,自動走行の実用化に向けた取組を発表するなど開発競争は激化するとともに,IoT化の進展に伴うデータの流通構造の変化とそれらの利活用による人工知能( AI)化が,自動走行システムのコアとして重要な位置づけになりつつある。このような状況を踏まえて,引き続き世界最先端の ITSの構築,自動走行に係るイノベーションの世界の中心地となることを目指して,平成27年6月に官民ITS構想・ロードマップ2015を策定した。主な改正・追加点は,図2に示す通り,自動走行システムや交通データ利活用に関する戦略をより具体化した点や,世界最先端ITSに向けた横断的取組を明確化した点等である。
【政府ホームページ掲載先】
「官民ITS構想・ロードマップ2015」の資料は,下記ホームページに掲載している。
https://www.kantei.go.jp/jp/singi/it2/senmon_bunka/douro/dai11/sankou1.pdf
自動走行システムを含むITSを巡る技術・産業は,引き続き急速に進展し続けており,また,2015年11月に開催された第二回未来投資に向けた官民対話において,安倍内閣総理大臣から「 2020年オリンピック・パラリンピックでの無人自動走行による移動サービスや,高速道路での自動運転が可能となるようにする。このため,2017年までに必要な実証を可能とすることを含め,制度やインフラを整備する。」との発言がなされたところである。このため,当該発言の具体的方策を含め,官民 ITS構想・ロードマップ2015の見直しを検討してゆく。
先進安全自動車の開発普及について
<1>自動車安全シンポジウムの開催について
国土交通省では,自動車安全対策の立案及び推進にあたり,自動車ユーザーの政策に対する理解の促進と透明性の確保を目的として,平成12年度より毎年,自動車安全シンポジウムを開催し,自動車の安全対策の現状と方向性について紹介している。
平成27年度は,11月4日,東京ビッグサイトにおいて,第44回東京モーターショー2015の関連イベントとして,『交通安全のための予防安全技術~これからの車両安全対策のなかで~』をテーマに開催し,約300人の参加があった。
同シンポジウムでは,基調講演において,予防安全技術を取り巻く社会状況の変化や予防安全技術の開発状況をはじめ,予防安全技術の現状について紹介があった。また,基調講演を踏まえたその後のパネルディスカッションでは,これからの予防安全技術に求められる要素して,<1>高齢社会に対応するもの,<2>広範に普及するもの,<3>正しく理解し使用できるもの(そのための環境整備も含む。)が挙げられるとともに,予防安全技術の今後の方向性について活発な議論が行われた。

<2>自動車アセスメントの本年度の動向(予防安全性能評価に後方視界情報提供装置を追加等)
国土交通省では独立行政法人自動車事故対策機構(NASVA)と協力し,公正中立な立場から自動車の安全性能評価を行うとともに,その結果を公表することにより,ユーザーによる安全な自動車の選択や,メーカーによる安全性能の高い自動車の開発を促進している。
これまでの衝突安全性能を中心とした自動車アセスメントに加えて,先進安全技術を用いて事故を未然に防止する予防安全技術の評価・公表を開始し,平成26年度から衝突被害軽減制動制御装置(いわゆる自動ブレーキ)と車線逸脱警報装置の安全性能評価を,さらに,平成27年度から後方視界情報提供装置(いわゆるバックカメラ)の安全性能評価を新たに開始したところである。なお,評価結果については,装置ごとに得点を表示するとともに,総合評価を各種パンフレット,ホームページ(http://www.nasva.go.jp/)を通じて公表を行っている。
今後,交通事故死傷者数の更なる低減と世界一安全な道路交通の実現に向け,予防安全技術の高度化と信頼性の向上を図る必要があり,予防安全性能アセスメントは非常に重要な役割を担うこととなる。下表に示すとおり,自動車アセスメントの対象となった装置については,急速に普及が進んでいる。自動車アセスメントでは,今後も,事故低減効果の高い先進安全技術の性能評価を順次拡充していき,安全性能の高い自動車の開発普及を促進していく。
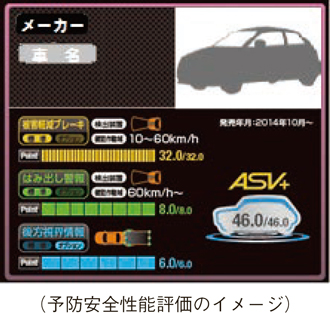
~予防安全性能アセスメントの試験のイメージ~
被害軽減ブレーキ※(前方自動車との衝突に対して)
試験方法
試験車を時速10~60km/hで模擬車両(ターゲット)に後方から接近させ,被害軽減ブレーキの作動試験をします。 試験は,ターゲットが止まった状態での試験と,20km/hで走行している場合の2種類があります。警報またはブレーキの作動により衝突を回避した場合,あるいは衝突した場合でも,衝突前にどの程度速度が低下していたかに応じて得点が与えられます。
※正式名称:衝突被害軽減制動制御装置:Autonomous Emergency Braking System(AEBS)

車線はみ出し警報※
試験方法
試験車を時速60km/hまたは70km/hで走らせ,道路の白線からはみ出したときに,警報を発するか否かの試験をします。警報を開始した速度が低い方が高い得点が与えられます。
※正式名称:車線逸脱警報装置: Lane Departure Warning System(LDWS)

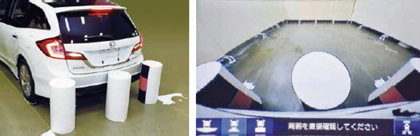
後方視界情報※
試験方法
年少者の事故が発生しやすい範囲について,幼児の体格を考慮した視対象物(ポール)を配置し,車内のモニター(バックビューモニター)で視対象物を確認します。
試験の結果,適合要件を満たさない箇所等があれば減点します。
※正式名称:後方視界情報提供装置
自動走行システムについて
<1>「自動走行システムに関する国際基準策定の状況」
国土交通省では,国連の「自動車基準調和世界フォーラム(WP29)」において,自動車の安全・環境基準に関する国際調和活動を推進している。
平成26年11月に開催されたWP29において,「自動運転分科会」を設置することが合意され,同分科会では,日本と英国が共同議長に就任し,セキュリティガイドライン等に関する議論を主導している。
また,平成27年2月に開催されたWP29傘下の「ブレーキと走行装置に関する専門分科会(GRRF)(議長:英国,議長代理:日本)」において,「自動操舵専門家会議」を設置することが合意され,同専門家会議では,日本とドイツが共同議長に就任し,高速道路上で自動で車線変更等を行うシステムに関する基準策定の議論を主導している。

<2>「完全自動走行の実現に向けた国際的議論への参画の状況」
平成28年2月,国際連合経済社会理事会の下の欧州経済委員会内陸輸送委員会において,我が国が,自動運転と国際条約との整合性等について議論を行っている「道路交通安全作業部会(WP1)」の正式メンバーとなることが承認された。警察庁では,外務省と協力しつつ,WP1への参画等を通じて,完全自動走行の早期実現を目指し,国際的な議論に参画している。
<3>「自動走行システムに関する公道実証実験のためのガイドライン」
警察庁では,平成27年10月から,有識者を交えて,自動走行の実現に関する法制度面を含む各種課題について検討を行っており,28年中に,交通の安全と円滑を図る観点から留意すべき事項等を示す「自動走行システムに関する公道実証実験のためのガイドライン」を策定・公表することとしている。
なお,自動走行システムに関する公道実証実験については,
- 公道実証実験に用いる車両が道路運送車両の保安基準(昭和 26年運輸省令第 67号)の規定に適合していること
- 運転者となる者が実験車両の運転者席に乗車して,常に周囲の道路交通状況や車両の状態を監視し,緊急時等には,他人に危害を及ぼさないよう安全を確保するために必要な操作を行うこと
- 道路交通法(昭和35年法律第105号)を始めとする交通関係法令を遵守して走行すること
という条件を満たせば,現行の道路交通法の下で行うことが可能である。