トピックス
先進技術について(車両)
官民ITS構想・ロードマップ2016
官民ITS構想・ロードマップ(以下ロードマップという)は,ITS(Intelligent Transport Systems:高度道路交通システム)・自動走行について我が国の方針を示した,IT総合戦略本部にて決定された国家戦略文書である。
このロードマップは,平成26年に初めて策定された。しかし,本分野における技術・産業の進展が早いため,最新状況を踏まえる形で毎年改定を重ねており,最新版は平成28年5月に策定された「官民ITS構想・ロードマップ2016」である。
本ロードマップでは,「世界一のITSを構築・維持し,日本・世界に貢献する」ことを一貫して掲げており,これに向けて民間及び関係省庁が一体となって取り組むべき方向とその具体的な工程表を示している。また,世界一のITSを構築するための目標としては,図1の通り2030年までに「世界一安全で円滑な」道路交通社会を構築するとの目標を設定している。
また,平成27年11月に開催された第二回未来投資に向けた官民対話において,安倍内閣総理大臣から「2020年オリンピック・パラリンピックでの無人自動走行による移動サービスや,高速道路での自動運転が可能となるようにする。このため,2017年までに必要な実証を可能とすることを含め,制度やインフラを整備する。」との発言がなされたことを踏まえ,官民ITS構想・ロードマップ2016では,この二つの自動走行システムの実現に向けたロードマップ(イメージ)を図2のように示すと共に,その具体的な工程を明確化している。
さらに自動走行に係るレベル定義や,上述の二つの自動走行システム以外のシステムも明確化しつつ,表1に示す市場化・サービス実現期待時期を設定している。
一方,官民ITS構想・ロードマップ2016の策定後も, ITS・自動走行を巡る技術・産業の動きは急速に変化している。このような環境下においても,引き続き世界最先端の ITSの構築,自動走行に係るイノベーションの世界の中心地となることを目指して,ロードマップのさらなる改定を検討しているところである。
【政府ホームページ掲載先】
「官民ITS構想・ロードマップ2016」の資料は,下記ホームページに掲載している。
http://www.kantei.go.jp/jp/singi/it2/kettei/pdf/20160520/2016_roadmap.pdf
戦略的イノベーション創造プログラム(SIP)自動走行システム
自動走行システムは,平成25年9月13日の総合科学技術会議(当時)で,社会的に不可欠で,日本の経済・産業競争力にとって重要な課題に対する取り組みである戦略的イノベーション創造プログラム(SIP)の10の課題(現在は11課題)の一つとして選定された。SIPでは,各課題の取り組みの推進のために,強力なリーダーシップを発揮するプログラムディレクター(PD)を選任しており,府省庁連携による分野横断的な取り組みや基礎研究から実用化・事業化までを見据えて一気通貫で研究開発することを特徴としている。
自動走行システムでは,車の自動運転の実現に向けて
・道路交通における安全確保,渋滞削減
・自動走行システムの実現と普及
・高齢者・交通制約者に優しい先進的な公共バスシステムの実現
の3つを大きな目標としており,各自動車メーカーや部品メーカー等が共通課題として取り組むべき研究開発領域を協調領域として明確化し,社会実装に向けて平成26年度より5か年計画で取り組んでいる。一方,比較的共通化の必要性が薄く,既に各社が開発競争にしのぎを削り合っている領域は競争領域と捉え,協調領域とは切り分けている。
自動走行システムでは,今までドライバーが担ってきた「認知」,「判断」,「操作」を最終的には機械が全て行うことになる。そこで,自動運転をするにあたり必要な地図であるダイナミックマップや通信のセキュリティ,ドライバーと車両システムや周辺の歩行者,周辺車両等との情報のやり取りの仕方を取り決めるHM(I Human Machine Interface),シミュレーション技術,データサーバ等の基礎技術の研究開発だけでなく,歩行者や自転車等の事故低減へ向けた取り組みや都市の次世代公共交通に資する取り組みを産学官一体となり協調領域として推進している。
今までの研究開発の成果に対し,2020年東京オリンピック・パラリンピック競技大会も見据えながら,自動走行システムの早期実装を実現するため,「ダイナミックマップ」,「HMI」,「情報セキュリティ」,「歩行者事故低減」,「次世代都市交通」の5テーマを中心として,国内外の自動車メーカーや部品メーカー,大学等と一緒に平成29年9月から関東近辺で大規模実証実験※を行う。
※大規模実証実験(平成28年11月15日)
https://www8.cao.go.jp/cstp/kaisaiannai/20161115sipadus.pdf
また,これに先立って,平成29年3月には沖縄でバス自動運転の実証実験※を実施し,バス停にバスをほぼ隙間なく正確に停車させる正着制御技術等の技術検証を行った。今年度以降も,自動走行技術の活用による,地域社会の活性化や交通環境の改善を目指し,誰にでも優しい公共交通バスの実現に向けて,公道を含めた実車での実証実験等に継続して取り組む。
更に,自動走行システムの普及に向けて,日本の自動車業界が国際的なリーダーシップをとっていけるように,また,社会の受容性を高めるために,毎年東京での国際workshopやメディアへ向けた情報発信の場としてのメディアミーティング,一般市民の要望を吸い上げる場,または理解醸成のための市民ダイヤログ等を随時開催している。
※沖縄でのバス自動運転実証実験(平成28年12月26日,平成29年2月17日)
https://www8.cao.go.jp/cstp/kaisaiannai/sip_okinawa.pdf
http://www.sip-adus.jp/wp/wp-content/uploads/topic17027_sip_okinawa2.pdf
先進安全自動車の開発普及について
<1>先進安全自動車(ASV)推進計画について
国土交通省では,先進安全自動車(ASV)の開発・実用化・普及を促進するため,平成3年より,産学官の連携の下,ASV推進計画を推進している。
平成28年度には,第5期ASV推進計画(計画期間:平成23~27年度)に係る成果報告会を実施し,ドライバー異常時対応システムや次世代の通信利用型安全運転支援システムに関するガイドラインの策定などの成果について取りまとめを行った。また,第6期ASV推進計画(計画期間:平成28~32年度)を新たに立ち上げ,実用化されたASV技術の本格的な普及を促進するとともに,路肩退避型等発展型ドライバー異常時対応システムの技術的要件等に関する検討を開始した。

<2>自動車アセスメントの動向(予防安全性能評価に対歩行者自動ブレーキを追加等)
国土交通省では,独立行政法人自動車事故対策機構(NASVA)と協力し,公正中立な立場から自動車の安全性能評価を行うとともに,その結果を公表することにより,ユーザーによる安全な自動車の選択や,メーカーによる安全性能の高い自動車の開発を促進している。
平成26年度からは,これまでの衝突時の乗員保護等を評価する衝突安全性能評価に加えて,先進安全技術を用いて事故を未然に防止する予防安全技術の評価・公表を開始した。具体的には,平成26年度に導入した衝突被害軽減ブレーキ(いわゆる自動ブレーキ)及び車線逸脱警報装置,平成27年度に導入した後方視界情報提供装置(いわゆるバックカメラ)に加え,平成28年度には,交通事故による死者のうち最も高い割合を占める歩行者への対応として,対歩行者衝突被害軽減ブレーキの安全性能評価を新たに開始した。
なお,評価結果については,装置ごとに得点を表示するとともに,総合評価を各種パンフレット,ホームページ(http://www.nasva.go.jp/)を通じて公表を行っている。
今後,交通事故死傷者数の更なる低減と世界一安全な道路交通の実現に向け,予防安全技術の高度化と信頼性の向上を図る必要があり,予防安全性能アセスメントは非常に重要な役割を担うこととなる。自動車アセスメントでは,今後も,事故低減効果の高い先進安全技術の性能評価を順次拡充していき,安全性能の高い自動車の開発普及を促進していく。
~予防安全性能アセスメントの試験のイメージ~
被害軽減ブレーキ(道路横断中の歩行者に対して)
試験方法
道路横断中の歩行者を模擬したターゲットに10km/h~60km/hで自動車を接近させて,衝突警報及び衝突被害軽減ブレーキの作動状況を確認する。具体的には,歩行者が見通しの良い道路を横断する場合と,駐車車両の陰から道路を横断する場合の2種類の交通環境を想定した試験を行う。
評価に当たっては,衝突警報の作動タイミング及び衝突被害軽減ブレーキの作動による衝突回避状況(衝突した場合には衝突時の速度低減量)を確認し,得点が与えられる。
自動運転について
○「自動運転に関する国際基準策定の状況」
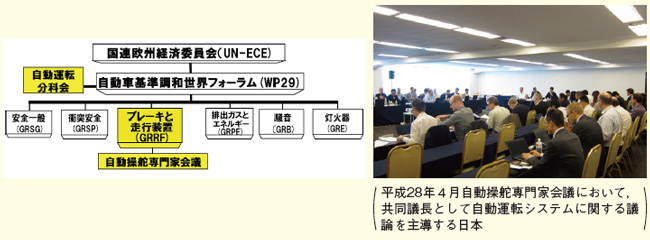
国土交通省では,国連の「自動車基準調和世界フォーラム(WP29)」において,自動車の安全・環境基準に関する国際調和活動を推進しており,自動運転の実現に向けた環境整備として,国土交通省自動運転戦略本部の検討事項として取り組んでいる。
WP29の下に設置された「自動運転分科会」では,日本と英国が共同議長を務め,自動運転車のサイバーセキュリティに関するガイドライン等について,国際議論を主導している。
また,WP29傘下の「ブレーキと走行装置に関する専門分科会(GRRF)(議長:英国,副議長:日本)」の下に設置された「自動操舵専門家会議」では,日本とドイツが共同議長を務め,高速道路上で自動で車線維持,車線変更等を行うシステムに関する国際基準策定の議論を主導している。
○「完全自動運転の実現に向けた国際的議論への参画の状況」
平成28年2月,国際連合経済社会理事会の下の欧州経済委員会内陸輸送委員会において,我が国が,自動運転と国際条約との整合性等について議論を行っている「道路交通安全作業部会(WP1)」の正式メンバーとなることが承認された。警察庁では,外務省と協力しつつ,WP1への参画等を通じて,完全自動運転の早期実現を目指し,国際的な議論に参画している。
○「自動走行システムに関する公道実証実験のためのガイドライン」
警察庁では,平成27年10月から,有識者を交えて,自動運転の実現に関する法制度面を含む各種課題について検討を行っており,28年5月に,適正かつ安全な公道実証実験の実施に資することを目的として,交通の安全と円滑を図る観点から留意すべき事項等を示す「自動走行システムに関する公道実証実験のためのガイドライン」を策定・公表した。
なお,自動走行システムに関する公道実証実験については,
- 公道実証実験に用いる車両が道路運送車両の保安基準(昭26運輸省令67)の規定に適合していること
- 運転者となる者が実験車両の運転者席に乗車して,常に周囲の道路交通状況や車両の状態を監視し,緊急時等には,他人に危害を及ぼさないよう安全を確保するために必要な操作を行うこと
- 道路交通法(昭35法105)を始めとする交通関係法令を遵守して走行すること
という条件を満たせば,現行の道路交通法の下で行うことが可能である。