特集 「先端技術を活用した交通安全の取組」
II 官民を挙げた先端技術に関する取組について
II 官民を挙げた先端技術に関する取組について
以下では,多岐にわたる交通安全に資する先端技術に関わる取組の中から,近年めざましい発展の見られる「自動運転に関する取組」,主に車に関わる取組として「自動運転の実現に向けた要素技術を含む安全運転を支援するシステム」,主に道路に関わる取組として「高度道路交通システム(ITS)に関わる施策」,「ビッグデータを活用した生活道路対策」,及び事故が発生してしまった場合に被害を軽減することに資する「緊急通報システム等の高度化に関わる取組」の5つに着目し,主要な取組の状況を記述する(特集-第4表)。
| 1 全体に関わる取組―自動運転技術 | |
|---|---|
|
|
| 2 車に関わる技術及び取組―安全運転支援システム | |
|
|
| 3 インフラに関わる技術及び取組―高度道路交通システム(ITS) | |
|
|
| 4 ビッグデータを活用した生活道路対策 | |
|
|
| 5 救助・救急活動のためのシステム等 | |
|
|
1 自動運転に関する取組
(1)官民ITS構想・ロードマップ2017
官民ITS構想・ロードマップ(以下「ロードマップ」という。)は,ITS(Intelligent Transport Systems:高度道路交通システム)・自動運転について我が国の方針を示した,高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議にて決定された国家戦略文書である。このロードマップは,平成26年に初めて策定されたが,本分野における技術・産業の進展がめざましいことから,最新状況を踏まえる形で毎年改定を重ねており,最新版は平成29年5月に策定された「官民ITS構想・ロードマップ2017」である。
本ロードマップでは,「世界一のITSを構築・維持し,日本・世界に貢献する」ことを一貫して掲げており,[特集-第8図]の通り,2030年までに「世界一安全で円滑な」道路交通社会を構築するという目標を設定している。またこれに向けて民間及び関係省庁が一体となって取り組むべき方向とその具体的な工程表を示している。
特に,我が国においては,事故削減と過疎地域等地方における高齢者等の移動手段の確保,ドライバー不足への対応等が喫緊の課題であることを踏まえ,自動運転システムの実現に向けたロードマップ(イメージ)(特集-第9図)を示すとともに,以下の3項目についてその具体的な工程を明確化している。
- ① 自家用車における自動運転の更なる高度化の実現
- ② 運転者不足等に対応する革新的効率的な物流サービスの実現
- ③ 地方,高齢者等向けの無人自動運転移動サービスの実現
また,自動運転に係るレベル定義(我が国では米国SAE2 InternationalのJ3016(特集-第5表参照)の定義を採用。)を踏まえつつ,上述の項目について市場化・サービス実現期待時期を[特集-第6表]のように設定している。
2 SAE:Society of Automotive Engineers
| レベル | 概要 | 安全運転に係る監視,対応主体 |
|---|---|---|
| 運転者が全てあるいは一部の運転タスクを実施 | ||
| SAE レベル0 運転自動化なし |
|
運転者 |
| SAE レベル1 運転支援 |
|
運転者 |
| SAE レベル2 部分運転自動化 |
|
運転者 |
| 自動運転システムが全ての運転タスクを実施 | ||
| SAE レベル3 条件付運転自動化 |
|
システム (作動継続が困難な場合は運転者) |
| SAE レベル4 高度運転自動化 |
|
システム |
| SAE レベル5 完全運転自動化 |
|
システム |
※ここでの「領域」は,必ずしも地理的な領域に限らず,環境,交通状況,速度,時間的な条件などを含む。
| レベル | 実現が見込まれる技術(例) | 市場化等期待時期 | |
|---|---|---|---|
| 自家用 | レベル2 | 「準自動パイロット※1」 | 2020年まで |
| レベル3 | 「自動パイロット※2」 | 2020年目途 | |
| レベル4 | 高速道路での完全自動運転 | 2025年目途 | |
| 物流サービス | レベル2以上 | 高速道路でのトラックの隊列走行 | 2022年以降 |
| レベル4 | 高速道路でのトラックの完全自動運転 | 2025年以降 | |
| 移動サービス | レベル4 | 限定地域での無人自動運転移動サービス | 2020年まで |
※1 準自動パイロット:
高速道路での自動運転モード機能(入口ランプウェイから出口ランプウェイまで。合流,車線変更,車線・車間維持,分流など)を有するシステム。自動運転モード中もドライバーが安全運転に係る監視・対応を行う主体となるが,走行状況等について,システムからの通知機能あり。
※2 自動パイロット:
高速道路等一定条件下での自動運転モード機能を有するシステム。自動運転モード中はシステムが全ての運転タスクを実施するが,システムからの要請に応じ,ドライバーが対応。
官民ITS構想・ロードマップ20173の策定後も,ITS・自動運転を巡る技術・産業の動きは急速に進展し続けており,引き続き世界最先端のITSの構築,自動運転に係るイノベーションの世界の中心地となることを目指して,ロードマップのさらなる改定を検討しているところである。
3 「官民ITS構想・ロードマップ2017」の資料は,下記ホームページに掲載。
http://www.kantei.go.jp/jp/singi/it2/kettei/pdf/20170530/roadmap.pdf
(2)戦略的イノベーション創造プログラム(SIP)における「自動走行システム」
総合科学技術会議(現「総合科学技術・イノベーション会議」)は,社会的に不可欠で,日本の経済・産業競争力にとって重要な課題に対する取組である戦略的イノベーション創造プログラム(SIP,以下「SIP」という。)の10の課題(現在は11課題)の一つとして自動走行システムを選定した。
SIPでは,各課題の取組の推進のために,強力なリーダーシップを発揮するプログラムディレクター(PD)を選任しており,府省庁連携による分野横断的な取組や基礎研究から実用化・事業化までを見据えて一気通貫で研究開発することを特徴としている。
自動走行システムでは,車の自動運転の実現に向けて
- 道路交通における安全確保,渋滞削減
- 自動走行システムの実現と普及
- 高齢者・交通制約者に優しい先進的な公共バスシステムの実現
の3つを大きな目標として,平成26(2014)年度より5か年計画で産学官が共同で取り組むべき協調領域を中心とした研究開発に取り組んでいる。
平成28(2016)年度からは,「ダイナミックマップ」,「HMI」,「情報セキュリティ」,「歩行者事故低減」及び「次世代都市交通」の5つの技術領域(重要5課題)に重点を置いた研究開発を推進している(特集-第10図)。
また,国際的に研究テーマをリードする専門家を交えて,自動走行システムに関わる課題の共有とその解決に向けた取組を議論する国際会議「SIP-adus4 Workshop」の開催,市民との対話を通じて市民の持つ問題意識や将来ニーズを今後の研究開発に反映することを目的とした「市民ダイアログ」等の社会受容性醸成のための取組も推進している。
平成29(2017)年度には,これまでの研究開発成果を着実に実用化・事業化に結び付けるための仕上げの時期に入り,実証実験を開始した。
4 SIP-adus :SIP- Innovation of Automated Driving for Universal Services
ア 大規模実証実験
平成29年10月に,東名高速道路,新東名高速道路,首都高速道路及び常磐自動車道並びに東京臨海地域の一般道路等において,国内外の自動車メーカー等20を超える機関が参加した大規模実証実験を順次開始した。
大規模実証実験では,これまで研究開発を推進してきた重要5課題を中心とした成果について,多くの自動車メーカー等が参加した開かれた場で多くの目で評価するとともに,海外メーカーの参加による国際連携・国際標準化を推進していくこととしている(特集-第11図)。
イ 地方への展開
地方等の社会課題に即した実装を推進するため,平成29年度は,以下の実証実験を実施した。
(ア) 沖縄におけるバス自動運転の実証実験等
内閣府では,平成29年3月,6~7月,11~12月に沖縄でバス自動運転の実証実験5を行った。バス停にバスを隙間なく正確に停車させる正着制御技術等の自動走行技術の活用により,高齢者や障害者の方々が利用しやすい,新たな公共バスシステムを提案し,地域の交通手段の確保,道路渋滞の解消等を目指す取組を実施している(特集-第12図)。
5 沖縄でのバス自動運転実証実験プレスリリース(平成29年10月27日)
https://www8.cao.go.jp/cstp/stmain/20171027artokinawa.html
| 沖縄県南城市 | 沖縄県石垣市 | 沖縄県宜野湾市・北中城村 | |
|---|---|---|---|
| 実施時期 | 平成29年3月 | 平成29年6~7月 | 平成29年11~12月 |
| 場所等 | 「あざまサンサンビーチ」周辺 | 離島ターミナル ⇔ 新石垣空港 | イオンモール沖縄ライカム ⇔ 宜野湾マリーナ |
| 目的 | 技術実証 | 社会実証 | 技術実証 |

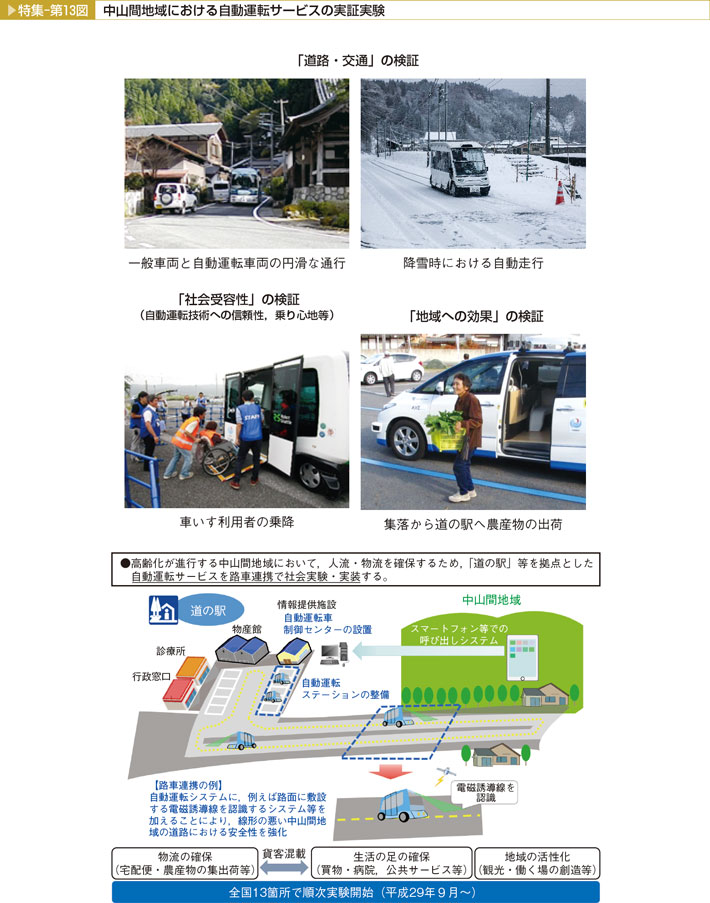
(イ) 中山間地域における道の駅等を拠点とした自動運転サービスの実証実験
中山間地域では高齢化が進行しており,日常生活における人流・物流の確保が喫緊の課題となっている。一方,全国1,134箇所に設置された「道の駅」については,そのほとんどが中山間地域に設置されており,物販をはじめ診療所や行政窓口など,生活に必要なサービスも集積しつつある。
国土交通省では,中山間地域における道の駅等を拠点とした自動運転サービスの実証実験を,平成29(2017)年度より全国13箇所で開始した。同実証実験では,道の駅等を拠点として,地域の特色を踏まえたビジネスモデルを検討するため,貨客混載による農作物や加工品等の配送や,既存の取組と連携し,自動運転車で集荷した農作物を高速バスによって他地域に出荷するなどの実験に取り組んだ。30(2018)年度は,これらの結果を踏まえつつ,ビジネスモデルの構築のため,長期間の実験を中心に実施する予定である(特集-第13図)。
(3)自動運転に係る制度整備
近年の自動運転に係る技術の進展に伴い,2020年に向けた市場化やサービス提供開始が視野に入りつつある。このような中,自動運転の早期の実用化を実現するため,官民が一体となり,国を挙げてその実現に向けた取組をさらに加速していくことが不可欠である。そのために,技術開発を進めるとともに,必要となる道路交通に関連する法制度の見直しを進めていくため,高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議において,政府全体の制度整備方針である「自動運転に係る制度整備大綱」を決定した。
本大綱では,自動運転システム搭載車両(以下「自動運転車」という。)の導入初期段階である2020年以降2025年頃の,公道において自動運転車と従来の非自動運転車(以下「一般車」という。)が混在し,かつ自動運転車の割合が少ない,いわゆる「過渡期」を想定した法制度の在り方を検討している。
ア 安全性の一体的な確保
安全性を担保するためには,「人間」「車両」「走行環境」の三要素が積み重なって一定のレベルに達する必要がある。「人間」は自動車を運転する人の認知や行動,「車両」は,自動車の特性や構造,具備している機能,「走行環境」は,走行ルールや走行するルートの道路・通信条件,自然条件などである。
自動運転技術が進展すると,人間の操作の一部を車両が代替することにより安全性が担保される割合が高まっていくと期待される。ただし,自動運転の市場導入期である2020年頃は,複雑な交通環境に対して車両のみで安全性を担保することが難しいため,自動運転向けに新たに走行環境条件を設定することにより,車両のみでなく,自動運転向け走行環境条件との組合せにより安全性を担保していくこととなる(特集-第14図)。
自動運転技術が実用化される際には,担保すべき安全レベルを上回り,また,自動運転技術の進展に伴い,将来的にはより安全性が高まっていくことが期待される。自動運転技術の実用化により,これまで人間の操作により担保されていた安全性が,車両及び自動運転向け走行環境条件により代替されて担保される。また,自動運転技術の進展に従って車両側で安全を担保できる割合が増えることにより,自動運転向け走行環境条件で安全を担保する割合が減っていくことが予想される。これらとは別に,一般車にも適用される走行環境についても,道路交通環境の整備等により安全性が高まることが期待される。
自動運転車の安全性については,技術の進展に応じて新技術に係る保安基準を検討し,また,自動運転向け走行環境条件の設定については導入地域の環境や条件をパターン化し,客観的な指標を作成することで安全性の確認ができるようにしていく。
ただし,自動運転向け走行環境条件は,当面は一律でなく,地域特性等を勘案し,関係省庁連携の下で,その都度条件を確認することにより,安全を確保しつつ,技術の進展に柔軟に対応することとし,安全基準と自動運転向け走行環境条件設定(運行・走行環境)で,一体的に安全を確保する仕組みを構築する(特集-第15図)。
イ 自動運転車の安全確保の考え方
安全基準の策定にあたっては,日本の世界最先端の自動車技術を世界に広げるため,引き続き国際的議論をリードする。また,これと並行して,以下のように国内の制度整備を行う。
- ① 自動運転車が満たすべき安全性の要件を,2018年夏頃を目途にガイドラインとして取りまとめ(例:制御システムの安全性,サイバーセキュリティ等)
- ② 自動運転車における保安基準を,技術開発の動向や国際的な議論を踏まえ,段階的に策定
- ③ 使用過程車の安全確保策の在り方について検討
- ④ 隊列で走行する車両に係る要件を検討(車両技術)
ウ 交通ルールの在り方
道路交通に関する条約(ジュネーブ条約)に係る国際的な議論に当たっては,引き続き関係国と協調してリーダーシップを発揮する。また,国際的な議論と並行して国内法制度見直しの検討を進め,国際的な議論及び自動運転に関する技術開発等の進展を踏まえ,速やかに国内法制度を整備する。
- ① 自動運転システムが,道路交通法令の規範を遵守するものであることを担保するために必要な措置を検討
- ② 限定地域での無人自動運転移動サービスについては,当面は,遠隔型自動運転システムを使用した現在の実証実験の枠組みが,事業化の際にも利用可能
- ③ 隊列で走行する車両に係る要件の検討(交通ルール)
エ 責任関係
万が一の事故の際にも迅速な被害者救済が確実になされる枠組みを構築する。また,責任関係の明確化及び事故原因の究明に取り組む。そのためのデータ取得・保存・活用についても検討する。
- ① 自動車損害賠償保障法において,自動運転システム利用中の事故により生じた損害についても,従来の運行供用者責任を維持
- ② 自動車損害賠償保障法において,保有者等が必要なセキュリティ対策を講じていない場合等を除き,ハッキングにより引き起こされた事故の損害は,政府保障事業で対応
- ③ 刑事責任の判断のため,自動運転車を市場化する際には,交通ルール,運送事業に関する法制度等により,様々な関係主体に期待される役割や義務を明確化していくこと等を踏まえて検討
- ④ 2020年を目途に,データ記録装置の設置義務化,データの記録機能,情報保有者の事故時の記録提出の義務化の要否を検討
オ 運送事業に関する法制度との関係
運転者が車内に不在となる自動運転車で旅客運送を行う際に,輸送の安全及び旅客の利便性を確保するために必要な措置を検討する。
カ その他
路車協調等のインフラや,消費者への説明について必要事項を検討する。
2 安全運転支援システムを活用した取組
(1)安全運転支援システムの技術
ア 先進安全自動車(ASV)推進計画
「先進安全自動車(Advanced Safety Vehicle,ASV。以下「ASV」という。)とは,先進技術を利用して,車両単体での運転支援システム,通信利用による運転支援システム等のドライバーの安全運転に資するシステムを搭載した自動車を指す。
国土交通省では,先進安全自動車(ASV)の開発・実用化・普及の促進により,交通事故死傷者数を低減し,世界一安全な道路交通を目指すプロジェクト「先進安全自動車(ASV)推進計画」(以下ASV推進計画)に平成3(1991) 年度から取り組んでいる。ASV推進計画では,有識者,日本国内の四輪・二輪の全メーカー,自動車部品メーカー,自動車関係団体,関係省庁などで構成されるASV推進検討会を設置し,この検討会において先進安全技術の技術要件をまとめたガイドラインの策定やASVの普及方策に関する検討などを行っている。
平成28(2016)年度から始まった第6期ASV推進計画では自動運転も検討の対象に含め,「自動運転の実現に向けたASVの推進」をテーマに,①自動運転を念頭においた先進安全技術のあり方の整理,②路肩退避型等発展型ドライバー異常時対応システムの技術的要件の検討,③IntelligentSpeed Adaptation(ISA6)の技術的要件の検討,④実現されたASV技術を含む自動運転技術の普及,などに取り組んでいる(特集-第16図)。
6 ISA:ISAとは,道路ごとの制限速度に応じて自動で速度制御を行う装置をいう。
イ 実用化された代表的なASV技術
実用化された主なASV技術のうち,以下では,「衝突被害軽減ブレーキ」,「ペダル踏み間違い時加速抑制装置」,「定速走行・車間距離制御装置」,「車線維持支援制御装置」及び「ドライバー異常時対応システム」について簡略に紹介する。
(ア) 衝突被害軽減ブレーキ
衝突被害軽減ブレーキは,前方の障害物との衝突を予測して警報し,衝突被害を軽減するために制動制御する装置であり,このシステムを搭載していると,前方の障害物との衝突が予測される状況において,運転者に警報で注意喚起することにより運転者自身が操作することを促したり,運転者が警報に気付かない時にブレーキを自動で制御する機能を有する。このシステムにより,前方障害物との衝突回避をサポートすることが可能となる。平成28年の新車乗用車装着率は66.2%となっている。
(イ) ペダル踏み間違い時加速抑制装置
ペダル踏み間違い時加速抑制装置は,発進時や低速走行時に,障害物などに対してシフトレバーやアクセルペダルの誤操作によって衝突するおそれがある場合,急発進や急加速を抑制する装置であり,平成28年新車乗用車装着率は47.1%となっている。
(ウ) 定速走行・車間距離制御装置
定速走行・車間距離制御装置は,一定速で走行する機能および車間距離を制御する機能をもった装置であり,先行車がない場合には設定速度で走行し,先行車がある場合には,車間距離を一定に保って走行したり,先行車に続いて停止したりする機能を有する。
平成28年新車乗用車装着率は12.2%となっている。
(エ) 車線維持支援制御装置
車線維持支援制御装置は,走行車線の中央付近を維持するよう運転者の操作力を制御する装置である。車線を逸脱すると警報を発したり,操舵を支援したりすることにより,車線中央付近を走行するよう自らハンドル操作を行う運転者の負荷を軽減する。平成28年新車乗用車装着率は13.7%となっている。
(オ) ドライバー異常時対応システム
ドライバー異常時対応システムは,運転中の体調急変により,ドライバーが安全運転を継続できなくなった場合に,ドライバーの異常を自動検知し,又は乗員や乗客が非常停止ボタンを押すことにより,緊急措置として,ドライバーに代わり車両を自動的に停止させるシステムである。運転者の異常に起因する人身事故が年間200~300件発生していることに鑑みると,これらの事故を防ぐ効果が期待される。
(2) 安全運転サポート車
ア 「安全運転サポート車」と普及・啓発のための取組
高齢運転者の事故防止対策のため,平成29年1月に経済産業省,国土交通省,金融庁及び警察庁は,「『安全運転サポート車』の普及啓発に関する関係省庁副大臣等会議」を設置し,自動ブレーキ等の先進安全技術を搭載した自動車の普及啓発策について集中的に検討を行い,同年3月に「中間取りまとめ」(特集-第17図)を行った。
同中間取りまとめにおいては,全ての運転者の交通事故防止等に資する自動ブレーキを搭載した自動車を「セーフティ・サポートカー(愛称:サポカー)」,高齢者特有の事故の防止や被害の軽減に効果が期待される自動ブレーキとペダル踏み間違い時加速抑制装置等を搭載した自動車を「セーフティ・サポートカーS(愛称:サポカーS)」と定義し,平成29年度・30年度を重点期間として,官民を挙げて普及啓発活動を実施することとした。加えて,「自動ブレーキ」の新車乗用車への搭載率を2020年までに9割以上とする目標を設定した。
具体的には,「中間とりまとめ」に基づき,「サポカー・サポカーS」の愛称やロゴ等を策定するとともに,①サポカー・サポカーSに搭載されている先進安全技術等をわかりやすく紹介したポスター・チラシを作成し,全国の警察本部及び運転免許センター,自動車ディーラー及び地方自治体等に配付,②各自動車販売店で実施している試乗会等関連情報をはじめ,サポカーに関する全ての情報を一元的に管理・発信するポータルサイト7の立ち上げ,③全国の運転免許センター,教習所,名古屋モーターショー等においてサポカーの試乗会や交通イベントを開催,④政府広報(TV,ラジオ等)を活用し,サポカー・サポカーのコンセプトや先進安全技術等についてわかりやすく情報提供を実施している。
7 サポカーに関するポータルサイト:https://www.safety-support-car.go.jp/
イ 技術基準の策定
高齢運転者による交通事故防止対策の一環として,国土交通省では,自動ブレーキ等の一定の安全効果が見込まれる水準に達した先進安全技術から国際基準化を主導し,安全基準等の策定を検討することとしている。現在,日本からの提案により平成29年11月に設置された国際連合欧州経済委員会自動車基準調和世界フォーラム(WP29)のブレーキ・走行装置分科会(GRRF)傘下の専門家会議(特集-第18図)において,わが国はEUと共に共同議長として,自動ブレーキに関する国際基準の策定に向けた検討ているほか,国内では,当該基準の策定に先立ち,自動ブレーキの性能を国が認定する制度を平成30年3月に創設した。また,新車への対策に加え,既販車への装着が可能な後付けの安全装置についても,安全性を担保しつつ,普及促進を図ることとしている。
ウ 自動車アセスメント
自動ブレーキなどの先進安全技術は,交通事故の防止や事故時の被害軽減の効果が期待されている。国土交通省では,自動車ユーザーが安全な自動車を選びやすい環境を整えるとともに,自動車メーカーによる安全技術の開発を促進するため,市販車の安全性能を比較・評価し,結果を公表する自動車アセスメントを実施している。平成26年度からは対車両の自動ブレーキ及び車線逸脱警報装置,27年度からは後方視界情報提供装置(バックカメラ),28年度からは対歩行者自動ブレーキ,29年度からは車線逸脱抑制装置の性能評価・公表を行っており,30年度からはペダル踏み間違い時加速抑制装置等の性能評価・公表を行う。
3 ITS(高度道路交通システム)を活用した取組
(1)交通管制システムの高度化
交通管制システムは,車両感知器等から収集した交通量や走行速度等のデータを分析し交通状況に即応した信号の制御を行うことで安全で円滑な交通流を形成し交通事故の防止等を図るほか,交通情報板等を活用した交通情報の提供を行うことで交通流・交通量の誘導及び分散を図るためのシステムである。
警察では,さらに効果的に交通を管理することを目的に,交通管制エリアの拡大や光ビーコンの整備拡充,プローブ情報を活用したきめ細かい交通情報の提供や信号制御の高度化等の交通管制システムの高度化を推進している。
(2)安全運転支援システム(DSSS8)
安全運転支援システムは,道路に設置された無線機等から運転者へ周辺の交通状況等を視覚・聴覚情報により提供するシステムであり,危険要因に対する注意を促し,ゆとりを持った運転ができる環境を作り出すことにより,交通事故防止を図っている。
8 DSSS:Driving Safety Support Systems
(3)信号情報活用運転支援システム(TSPS9)
信号情報活用運転支援システムは,運転者に信号交差点への到着時における信号灯火等に関する情報を事前に提供するシステムであり,ゆとりある運転を促し,急停止・急発進に伴う事故の防止等を図っている。
9 TSPS:Traffic Signal Prediction Systems
(4)現場急行支援システム(FAST10)
現場急行支援システムは,パトカー,救急車等緊急車両が緊急走行を行う際に,それらを優先的に走行させる信号制御等を行うシステムであり,緊急通報からのリスポンス・タイムを短縮し,被害者の早期救助等を行うとともに,緊急走行に起因する事故防止を図っている。
10 FAST:Fast Emergency Vehicle Preemption Systems
(5)ETC2.0
ETC2.0は,道路と車両間の双方向で大量の情報の送受信や,インターチェンジの出入り情報だけでなく経路情報の把握が可能となるなど,これまでのETC11(有料道路等における料金収受機能のみ)と比べて格段と進化した機能を有している。このようにETC2.0は,渋滞回避,安全運転支援等の情報提供サービスや,路側機を通して収集される経路情報の活用などを通じて,道路利用者や道路政策に様々なメリットをもたらし,ITS推進に大きく寄与するシステムである。ETC2.0で期待されるサービスの例として,経路上の広域情報や画像の提供,特車許可における一括申請や自動更新,高速料金の経路割引や一時退出などが挙げられる。
11 ETC:Electronic Toll Collection System (電子式料金自動収受システム)
平成30年3月時点でETC2.0対応の車載器が約261万台の車両にセットアップされており,全国の高速道路上に設置された約1,700ヵ所のETC2.0路側機を活用し,広域的な渋滞情報の提供や,カーブ先の見えない渋滞といった危険な状況の注意喚起など,交通の円滑化と安全に向けた取組を進めている(特集-第19図)。
4 ビッグデータを活用した生活道路対策
ETC2.0のプローブ情報の活用
ETC2.0では,路側機から収集される車両の走行速度や走行経路,急ブレーキのデータなど,多種多様できめ細かい自動車走行履歴(プローブ情報)を大量に収集することができる。
国土交通省では,このようなビッグデータの活用により,これまでの事故発生個所に対する対症療法型の対策から,速度超過や急ブレーキ発生等の潜在的な危険箇所を特定して速度抑制や通過交通の進入抑制の対策を実施する「生活道路対策エリア」における取組を推進している(特集-第20図)。
5 緊急通報システム(HELP)・事故自動通報システム(ACN)・先進事故自動通報システム(AACN)に関する取組
「緊急通報システム(HELP12)」や「事故自動通報システム(ACN13)」は,エアバッグが展開するような大きな交通事故が発生した際に,車載装置・携帯電話等を通じて,本人や目撃者の代わりに自動車から自動的に事故が発生した地点等をコールセンターに通報することを可能とするシステムである。同システムからの通報を受けたコールセンターのオペレーターは状況を聴取し,必要に応じて消防・警察に対して,交通事故の発生地点等に加え運転者の意識の有無などの情報を伝える。これにより,救急自動車やパトカー等の緊急車両の現場到着時間を短縮し,負傷者の早期救出や迅速な事故処理などの対応を可能とすることが期待される(特集-第21図)。
12 HELP:Help system for Emergency Life saving and Public safety
13 ACN:Automatic Collision Notification
また,「先進事故自動通報システム(AACN14)」では,交通事故が発生した際に自動車から自動的に通報される情報に,車内乗員の傷害の状況を予測することができる情報が含まれており,通報を受けたオペレーターは,消防指令センターや救急医療機関に位置情報や車内乗員の傷害状況予測を伝える。これにより救急車やドクターヘリ等の現場到着時間や医師による治療を受けるまでの時間が短縮されることが期待される(特集-第22図)。
14 AACN:Advanced Automatic Collision Notification
これらのシステムは,交通事故に関する情報を迅速かつ正確に消防や警察等に通報することを可能とする仕組みである。医師による治療までに要する時間を短縮することにより,交通事故被害者の救命率の低下を防ぐことを可能とするものであり,同システムの普及を図っている。また,国土交通省では,平成30年度から,自動車アセスメントの枠組みにおいて,「事故自動通報システム(ACN)」及び「先進事故自動通報システム(AACN)」の車両への装備の有無による評価を実施し,その普及の促進を図ることとしている。